[toc] 参考链接:
https://blog.csdn.net/cyj972628089/article/details/113293682
https://www.pianshen.com/article/6769275504/
陀螺仪量程配置
在MPU9250的数据手册中,提供了陀螺仪的数据表如下:
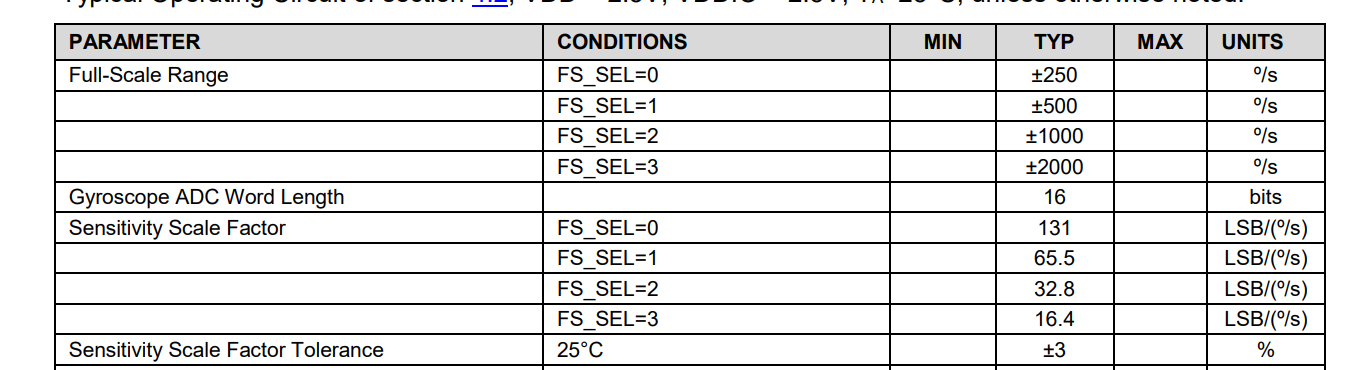
在表格里面,列出了当寄存器FS_SEL选择不同数值时的陀螺仪量程范围。 以四轴常用的FS_SEL=3为例,这时陀螺仪的量程为-2000到+2000,单位deg/s。
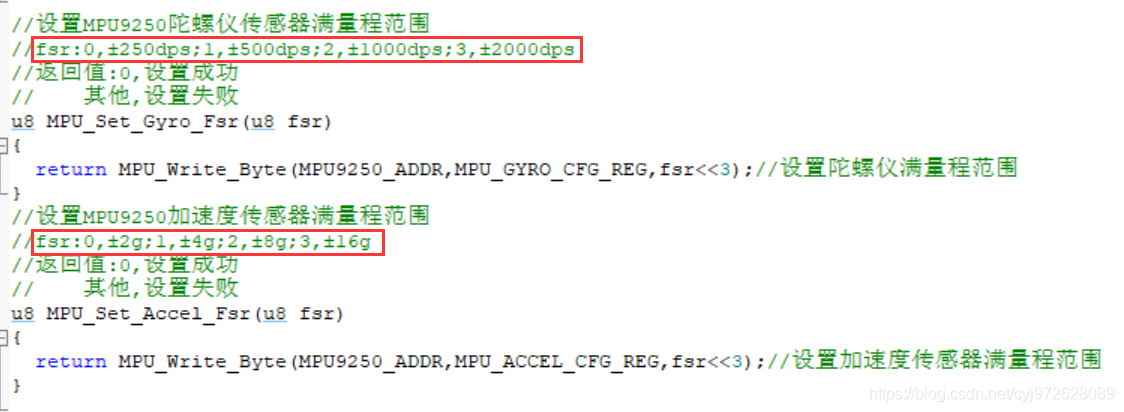
配置函数:
由于MPU6050采用的是16位带符号数作为陀螺仪测量数据输出,即数据类型是int16。所以以16进制来表示,最小的数是FFFF,由于最高位为符号位,所以相当于-7FFFF,即-32767;最大的数是7FFF,即32767。
综合上述的描述,我们可以得到,数字-32767对应-2000度每秒的陀螺仪角速度,32767对应2000度每秒的陀螺仪角速度。把32767除以2000,就可以得到16.40, 即我们说的灵敏度。
从上面的计算可知,把从陀螺仪读出的数字除以16.40,就可以换算成陀螺仪的角速度数值。举个例子,如果我们从陀螺仪读到的数字是1000,那么对应的角速度数据是1000/16.40=61度每秒。
1 | /**********************陀螺仪读取*****************************/ |
在四轴姿态计算中,我们通常要把角度换算成弧度。我们知道2Pi代表360度,那么1度换算成弧度就是:2Pi/360=(2*3.1415926)/360=0.0174532。用倒数表示就是:1/57.30
通过上述分析,我们就可以知道,当采用量程为-2000到+2000的范围,把我们从陀螺仪获取的数据做如下处理,就可以用于四元数的姿态解算(用gyro_x来代表从陀螺仪读到的数据): gyro_x/(16.4057.30)=gyro_x0.001064,单位为弧度每秒。
加速度计量程配置
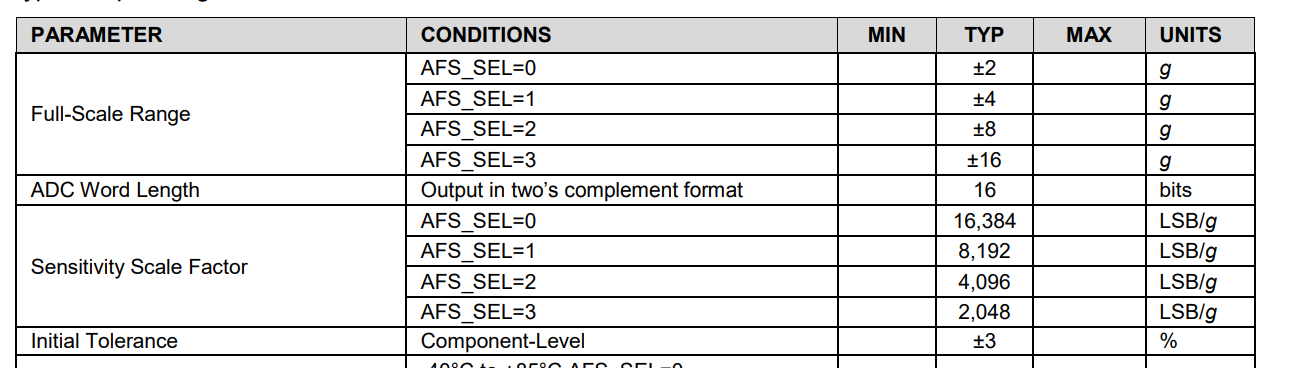
采用和陀螺仪同样的计算方法,当AFS_SEL=3时,数字-32767对应-16g,32767对应16g。把32767除以16,就可以得到2048, 即我们说的灵敏度。把从加速度计读出的数字除以2048,就可以换算成加速度的数值。举个例子,如果我们从加速度计读到的数字是1000,那么对应的加速度数据是1000/2048=0.49g。g为加速度的单位,重力加速度定义为1g, 等于9.8米每平方秒。如果需要换算为g/(m/s^2) 则对应加速度数据为data*9.8/2048
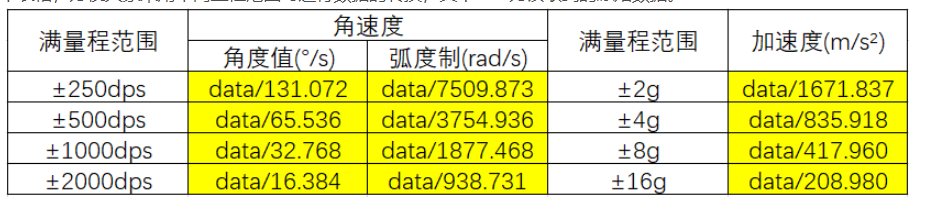
转换表格