
mavros添加发布 tfmini 距离传感器数据
有关px4连接tfmini并配置的部分请自行到 Px4 使用手册 查找相关说明,配置成功后打开QGroundControl, 找到Mavlink Inspector, 选择 DISTANCE_SENSOR可以看到发布的高度传感器的id和数据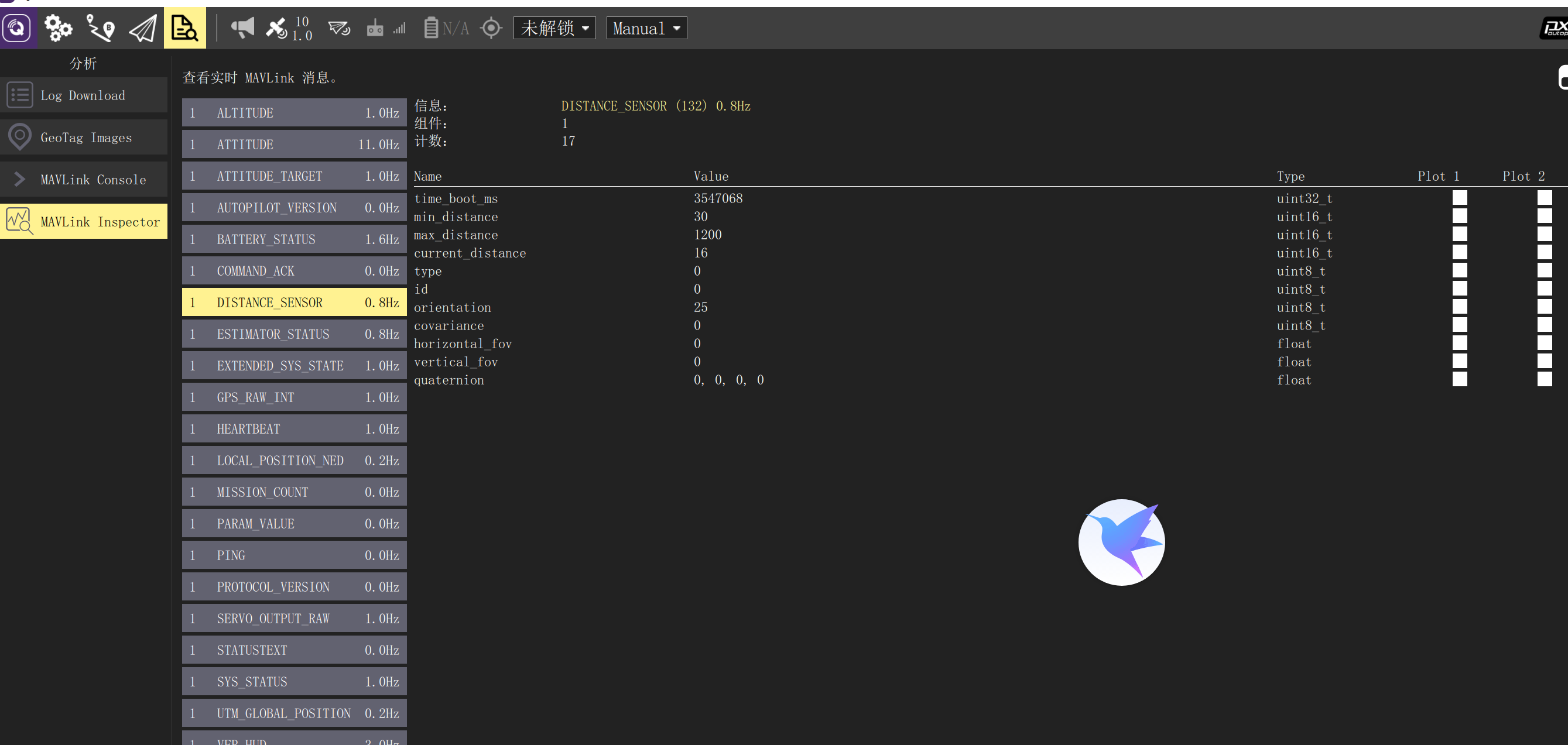
首先说明下MAVROS px4在启动时调用 roslaunch mavros px4.launch <args> ,打开($ find mavros)/mavros/launch/px4.launch
1 | <launch> |
然后定位到 node.launch
1 | <launch> |
可以看出node.launch是主节点,调用了配置文件 px4_config.yaml 和插件配置文件 px4_pluginlists.yaml。 px4_config文件主要是定义了发布和订阅的节点,有关distance sensor的部分如下: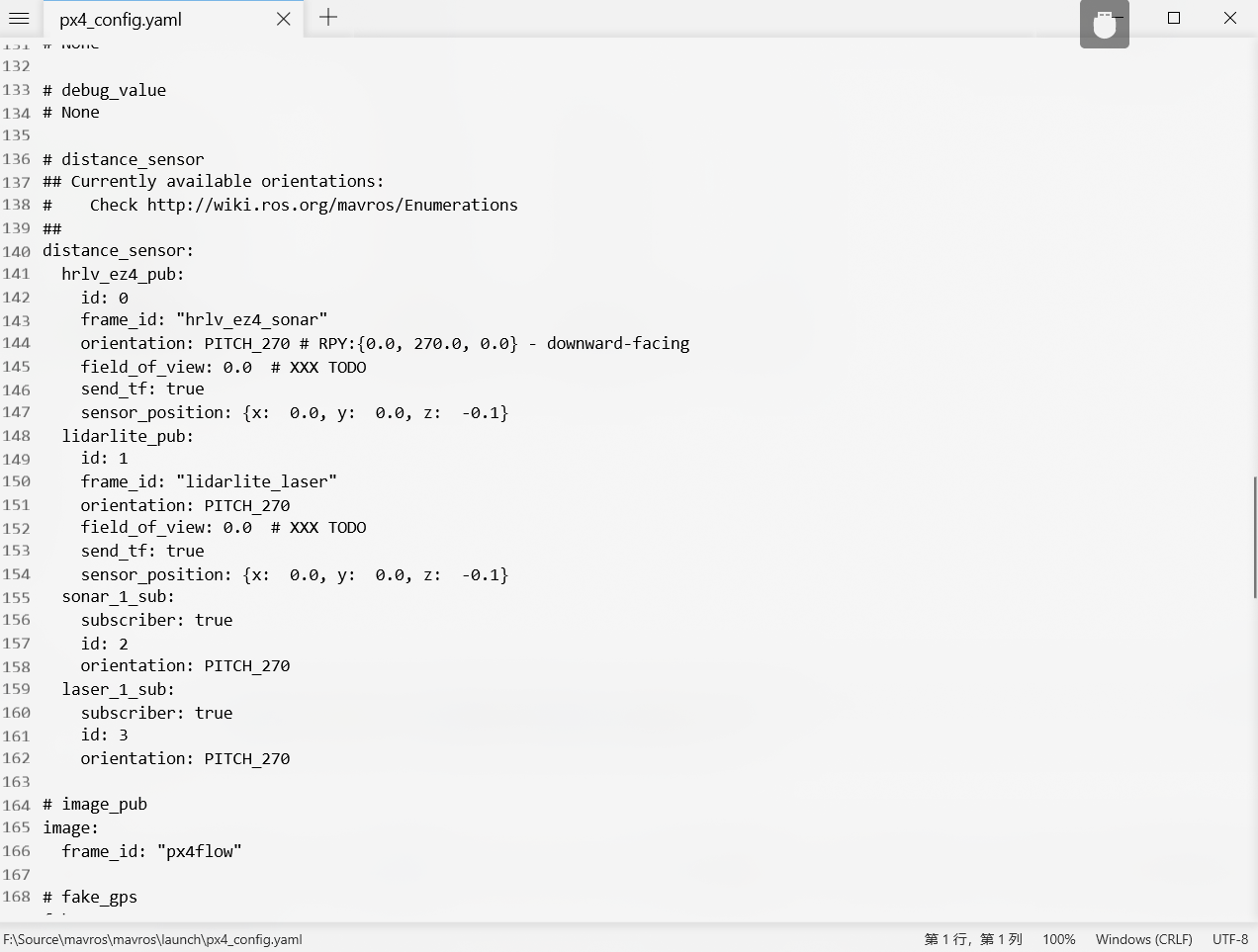
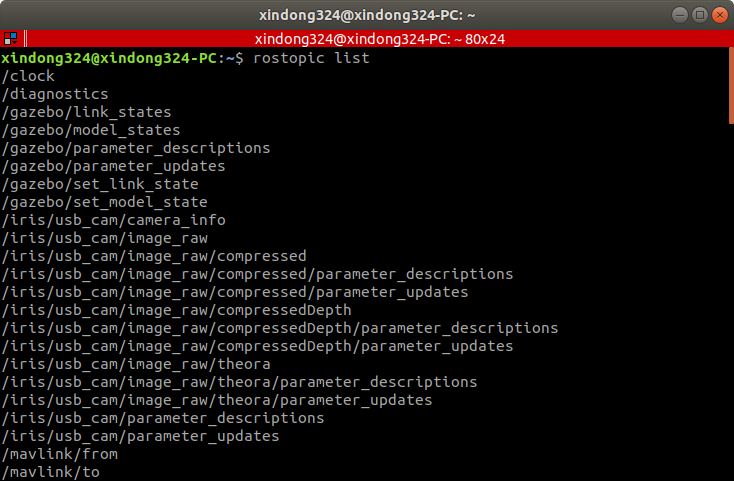
可以看出config 文件中定义了有关distance sensor的部分,但是直接运行mavros的显示信息以及rostopic list的结果如下,可以看出是没有发布distance sensor相关的topic的: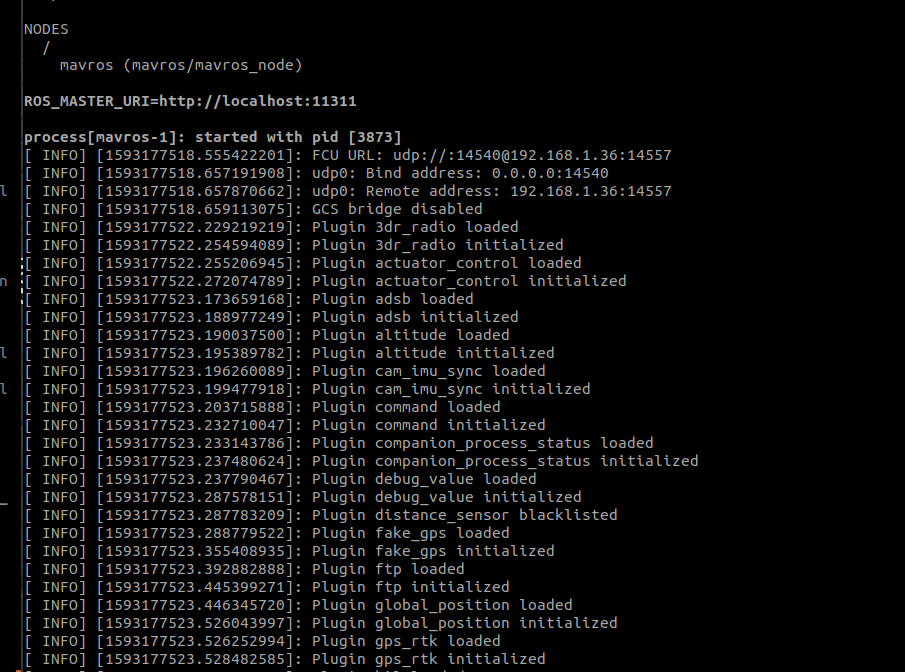
原因是px4_pluginlists文件中定义了调用的插件的黑白名单,内容如下: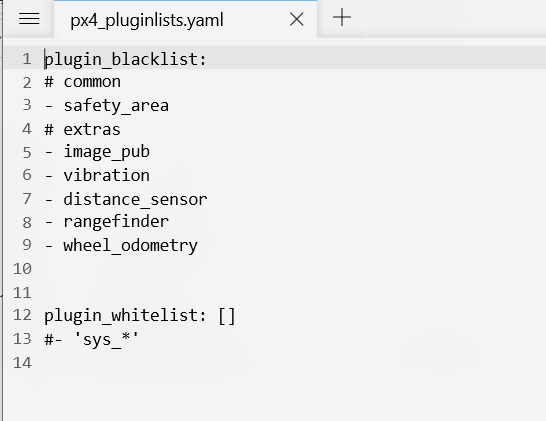
因此可以看出distance sensor被添加到了黑名单中,将其注释掉: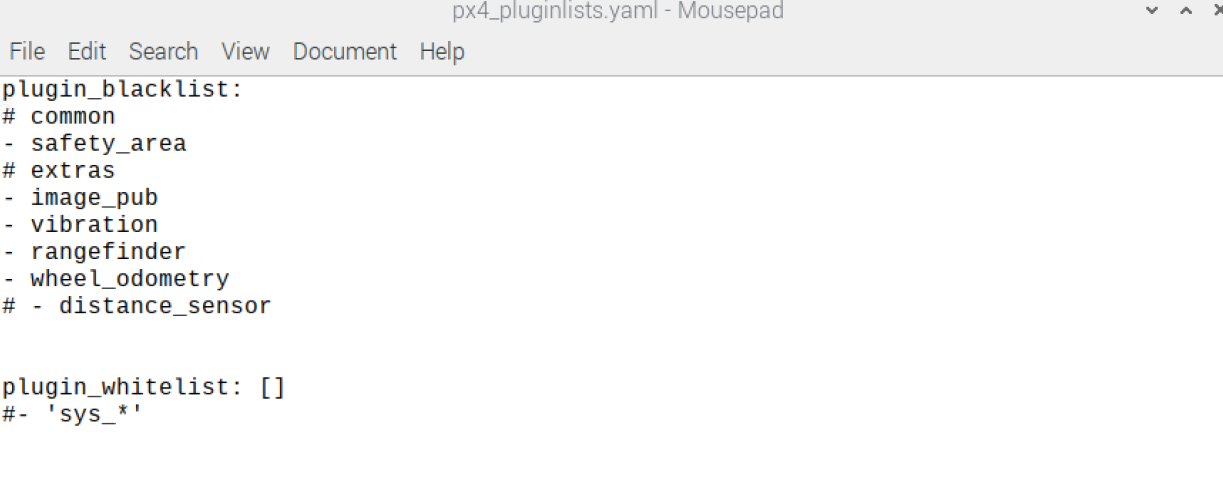
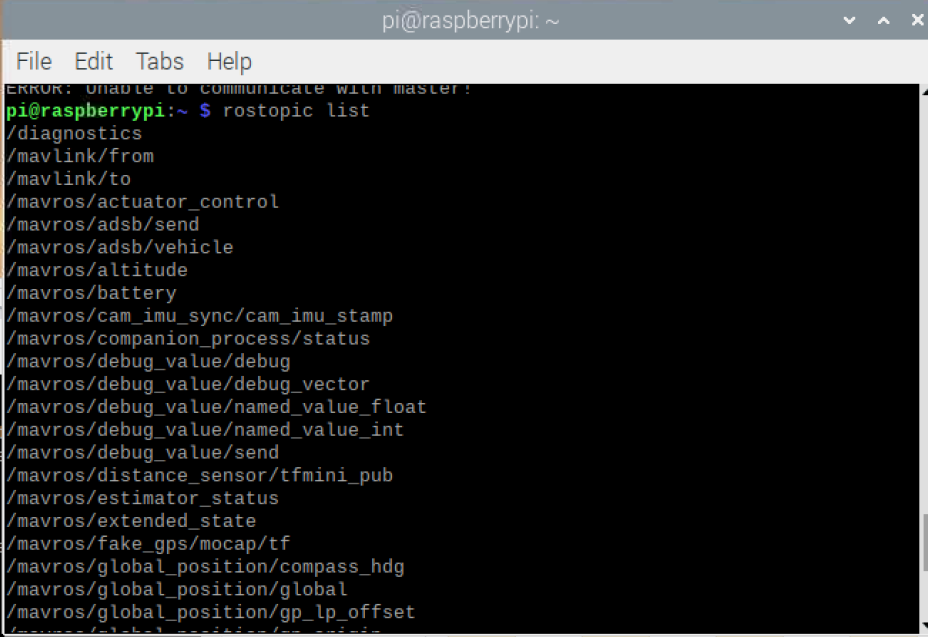
再次运行mavros,rostopic list结果如下: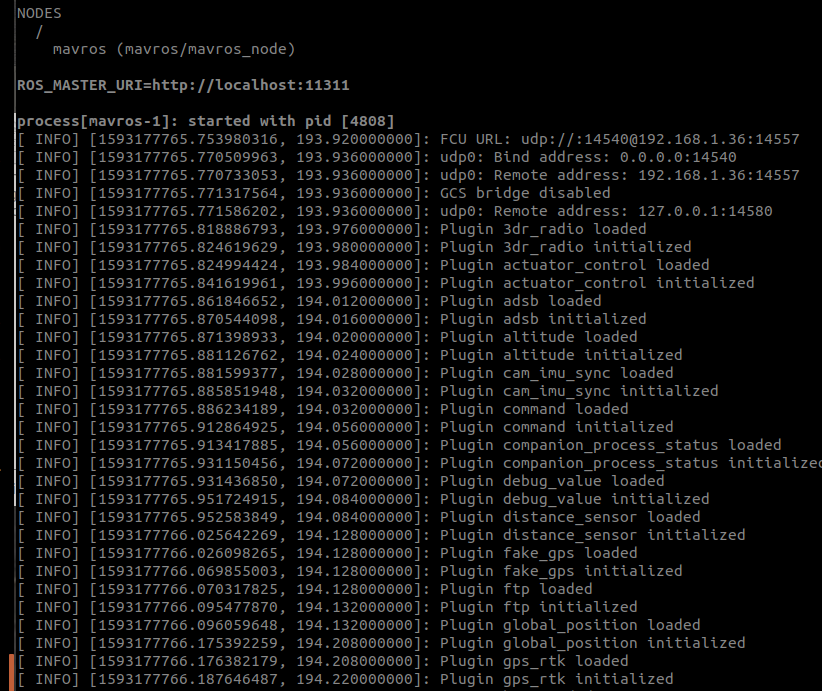
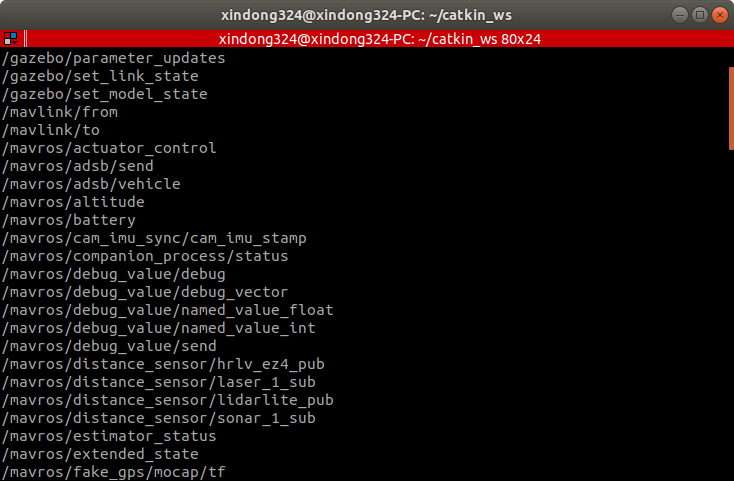
可以看到config中定义的distance sensor都被发布出来了,此时,由于我们只使用到了tfmini,从QGround中看出其id为0,因此对config文件做如下修改,只保留tfmini的topic: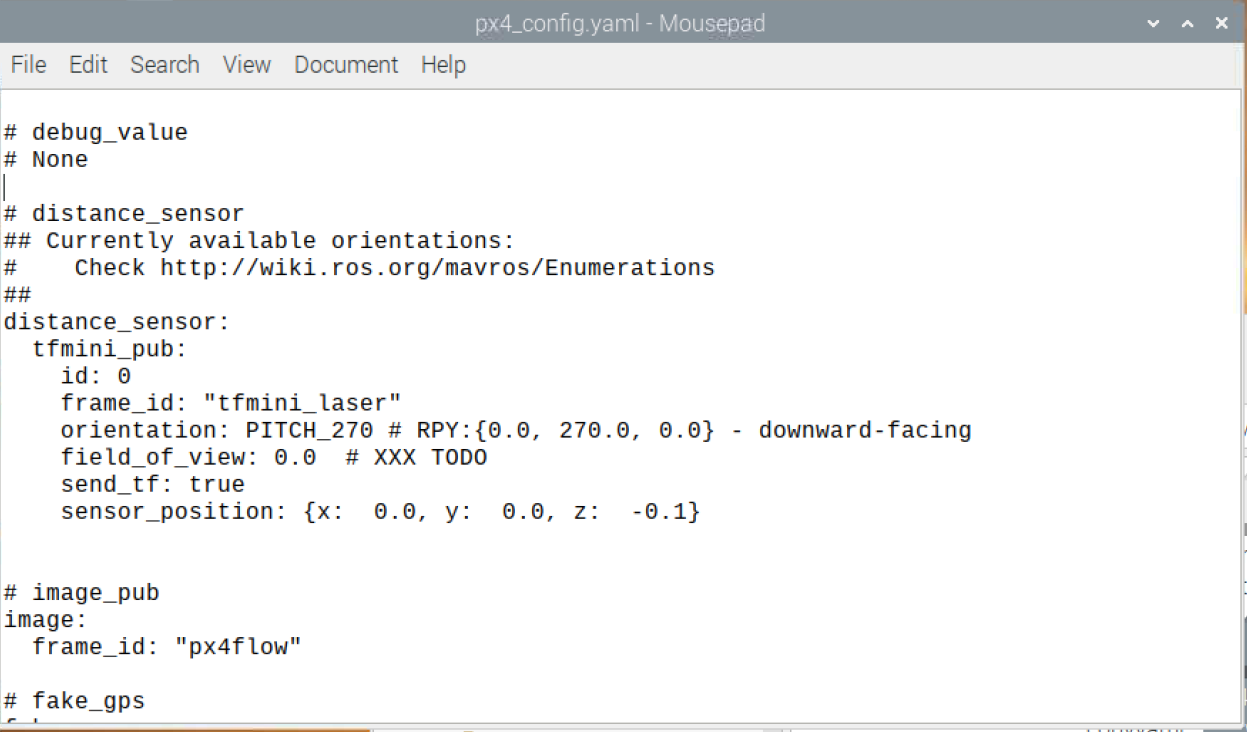
此时再次运行mavros,rostopic list结果为: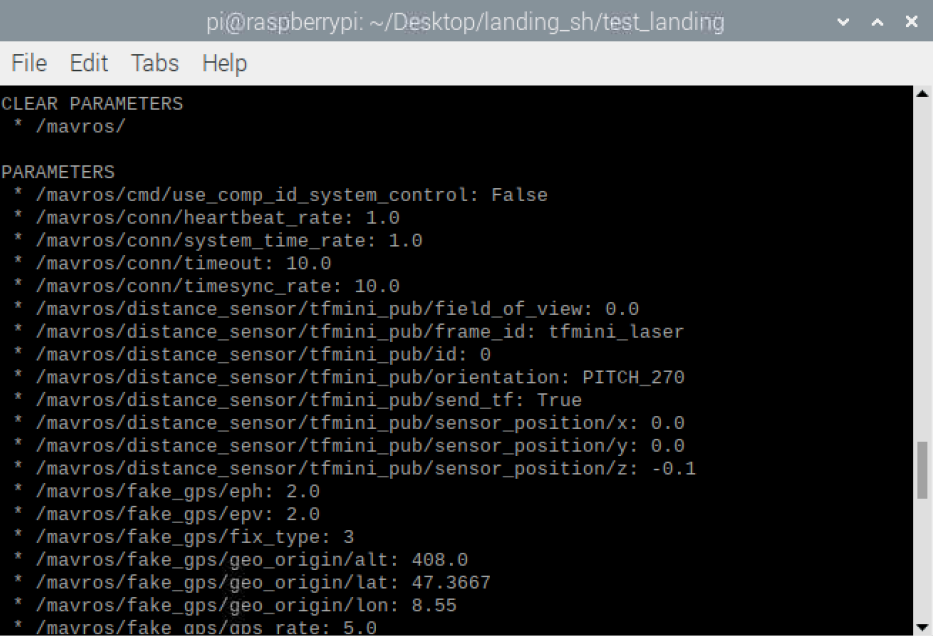
同时我们对话题进行 echo: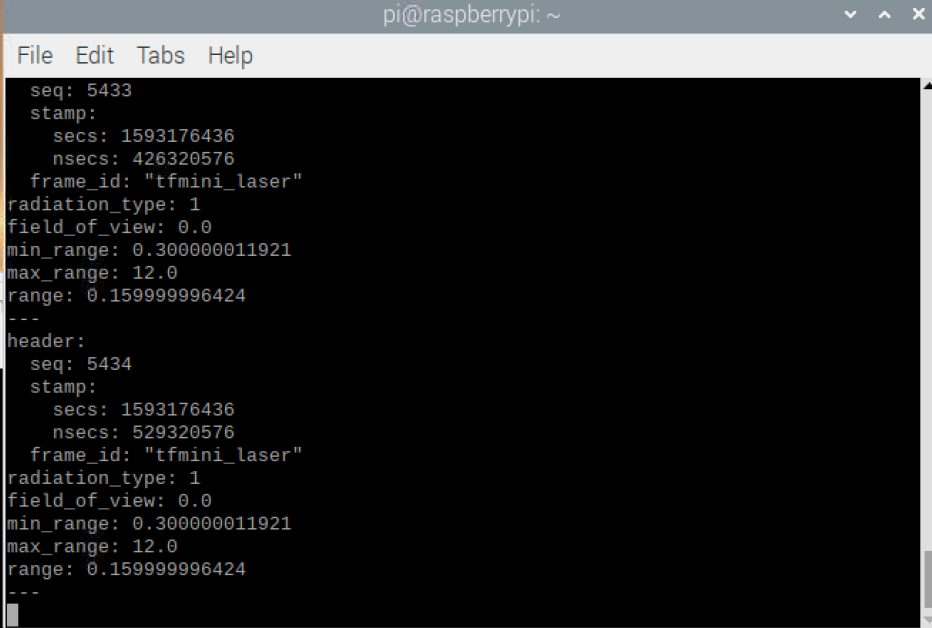
enjoy!